高導磁合金在機器人應用上的解決方案
ROBOT
高導磁合金在機器人應用上的解決方案
Solutions for high-permeability magnetic alloys in robotic applications
高導磁合金在機器人應用上的解決方案
以工程實務導向整理「高導磁合金在機器人應用上的解決方案」,用「問題 → 材料 → 作法 → 效益」快速對應實際設計。
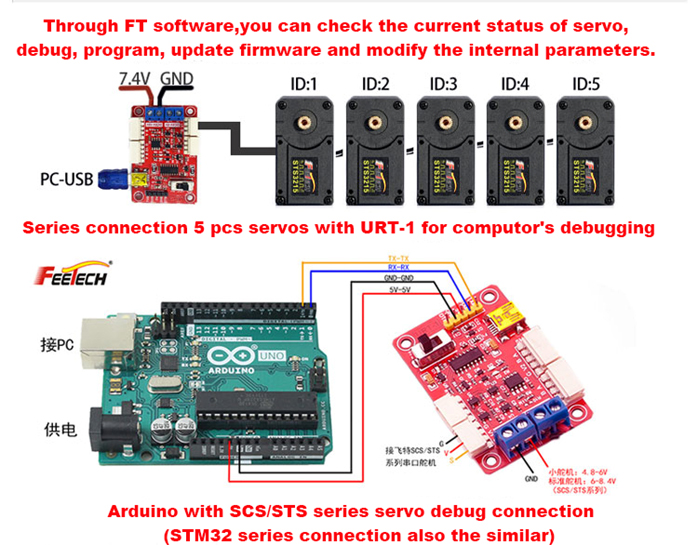
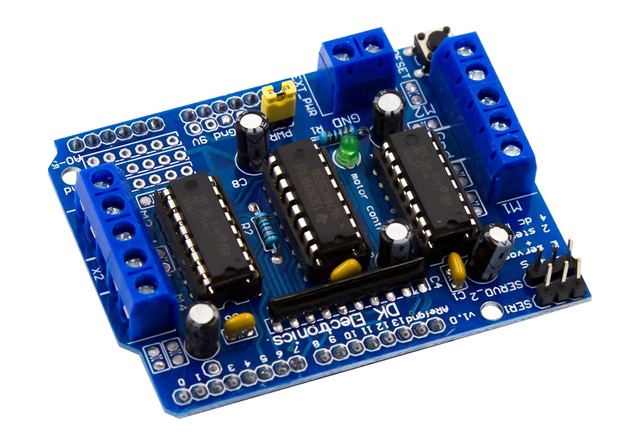
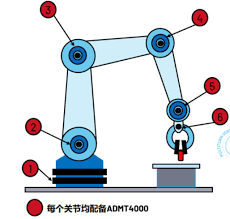
一、伺服馬達與關節模組
 |
 |
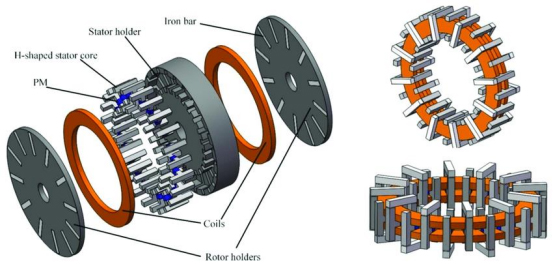 |
問題:高頻磁通外洩、渦流損失、編碼器受干擾
材料:坡莫合金、奈米晶高導磁合金
作法
- 定子外圈/端蓋加裝高 μ 屏蔽環
- 薄片疊層結構降低渦流
效益 - 扭矩效率↑、發熱↓
- 位置回授更穩定
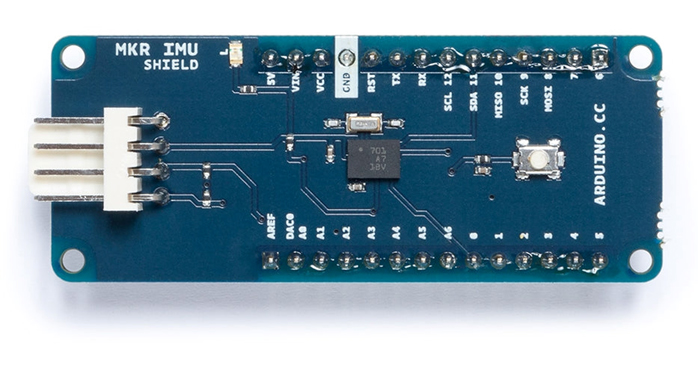
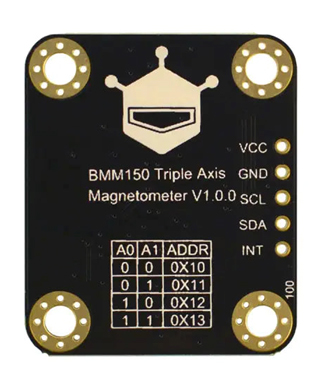
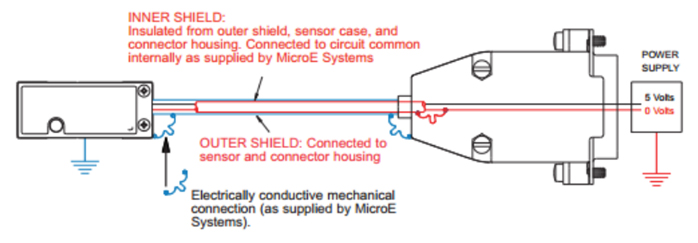
二、感測器(IMU/磁力計/編碼器)
 |
 |
 |
問題:馬達磁場造成零飄與誤判
材料:超薄高導磁合金箔
作法
- 感測器「局部包覆」式磁屏蔽
- 與接地/走線分離設計
效益 - IMU 漂移↓、姿態解算更準
- 編碼器抖動減少
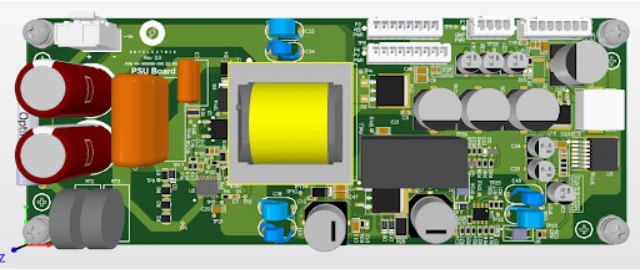
三、電源與功率電子(驅動器/DC-DC)
 |
 |
 |
問題:高 di/dt 造成 EMI、通訊不穩
材料:奈米晶合金+吸波材
作法
- 功率模組外殼磁屏蔽
- 高導磁合金(導磁)+導電層(反射)複合
效益 - EMI 明顯下降
- 通訊與控制穩定度↑
四、機器人視覺與 AI 模組
 |
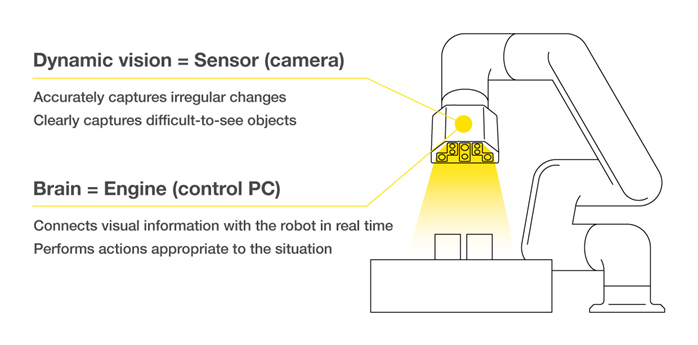 |
問題:影像噪點、AI 模組誤觸發
材料:薄型高導磁合金
作法
- 相機/AI 板卡重點屏蔽
- 與馬達模組磁隔離
效益 - 影像穩定、辨識率提升
- 算法輸出更一致
五、人形/協作機器人安全
 |
 |
 |
問題:磁場外洩影響安全感測
材料:高導磁合金複合板
作法
- 關節模組整體磁屏蔽
- 安全感測器獨立隔離
效益 - 誤觸發降低
- 人機互動安全性↑
設計重點
- 頻段選材:
- 低頻磁場 → 高 μ 坡莫合金
- 高頻切換 → 奈米晶合金+吸波材
- 結構:薄片疊層抑制渦流
- 重量:局部化屏蔽,避免整體包覆
- 整合:導磁層(吸磁)+導電層(反射)最佳
總結
在機器人中,高導磁合金的核心價值是抑制磁干擾、提升控制精度、降低能耗、強化安全性。以關節、感測、功率模組的局部化應用,可在不顯著增加重量與成本下,顯著提升整體性能。
推薦材料
摩新有1Hz~100GHz高低全頻的高導磁合金產品,可解決各種頻率所產生的電磁波EMI干擾。